이전
다음
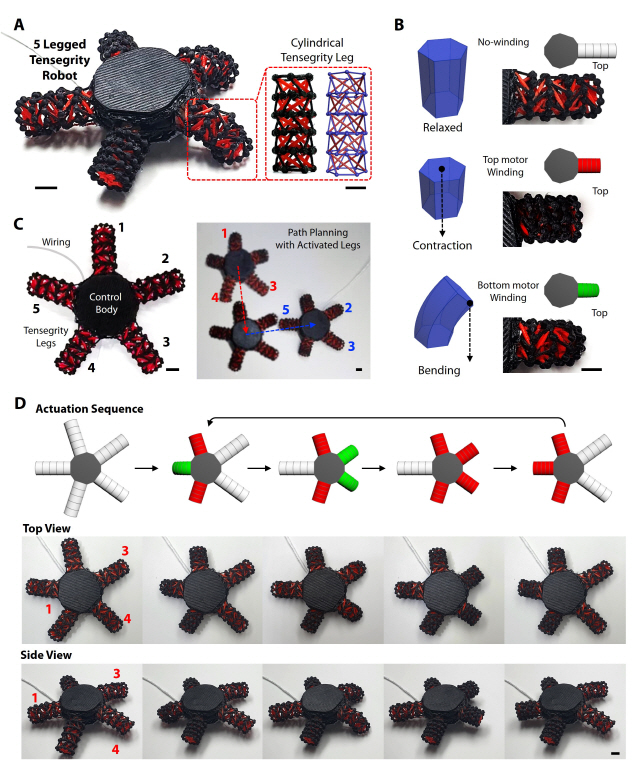 불가사리 로봇의 형태와 거동. (A) 불가사리 로봇과 그 다리를 이루는 텐세그리티 구조. (B) 불가사리 로봇의 다리가 만들어내는 3가지 동적 상태. (C) 불가사리 로봇의 방향 전환 거동. (D) 불가사리 로봇의 거동 순서를 나타낸 3D 이미지, 상면사진, 측면사진. /사진제공=UNIST
불가사리 로봇의 형태와 거동. (A) 불가사리 로봇과 그 다리를 이루는 텐세그리티 구조. (B) 불가사리 로봇의 다리가 만들어내는 3가지 동적 상태. (C) 불가사리 로봇의 방향 전환 거동. (D) 불가사리 로봇의 거동 순서를 나타낸 3D 이미지, 상면사진, 측면사진. /사진제공=UNIST
 유연하면서도 강인한 소프트 로봇 제작 기술을 개발한 김지윤 교수(좌측)과 제1저자인 이하준 연구원(중앙). /사짅공=UNIST
유연하면서도 강인한 소프트 로봇 제작 기술을 개발한 김지윤 교수(좌측)과 제1저자인 이하준 연구원(중앙). /사짅공=UNIST
불가사리 로봇의 형태와 거동. (A) 불가사리 로봇과 그 다리를 이루는 텐세그리티 구조. (B) 불가사리 로봇의 다리가 만들어내는 3가지 동적 상태. (C) 불가사리 로봇의 방향 전환 거동. (D) 불가사리 로봇의 거동 순서를 나타낸 3D 이미지, 상면사진, 측면사진. /사진제공=UNIST
유연하면서도 강인한 소프트 로봇 제작 기술을 개발한 김지윤 교수(좌측)과 제1저자인 이하준 연구원(중앙). /사짅공=UNIST