이전
다음
 뇌-기계 인터페이스 시스템. 제공=KAIST
뇌-기계 인터페이스 시스템. 제공=KAIST
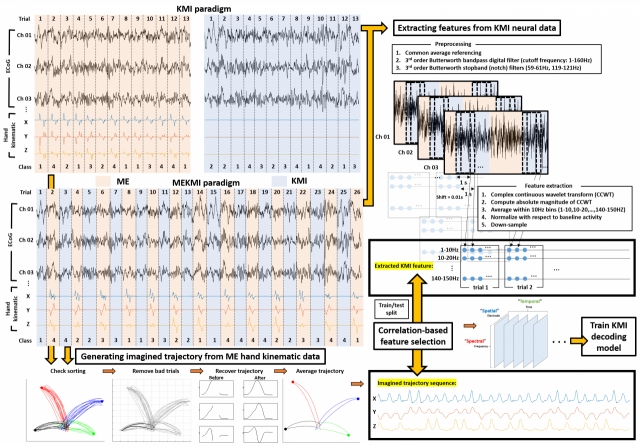 팔 동작 방향 상상 뇌 신호 디코딩 알고리즘 개념도. 사진제공=카이스트
팔 동작 방향 상상 뇌 신호 디코딩 알고리즘 개념도. 사진제공=카이스트
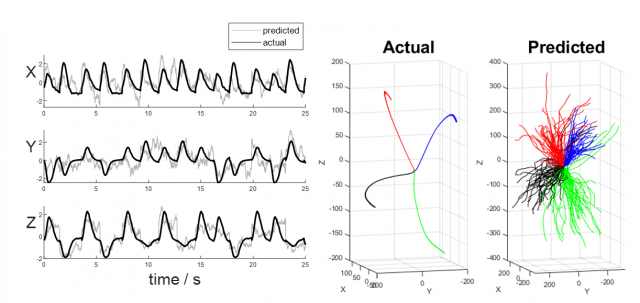 디코딩 모델을 활용한 상상 궤적 예측 결과. 사진제공=카이스트
디코딩 모델을 활용한 상상 궤적 예측 결과. 사진제공=카이스트
 정재승 KAIST 뇌인지과학과 교수. 사진제공=KAIST
정재승 KAIST 뇌인지과학과 교수. 사진제공=KAIST
뇌-기계 인터페이스 시스템. 제공=KAIST
팔 동작 방향 상상 뇌 신호 디코딩 알고리즘 개념도. 사진제공=카이스트
디코딩 모델을 활용한 상상 궤적 예측 결과. 사진제공=카이스트
정재승 KAIST 뇌인지과학과 교수. 사진제공=KAIST