KAIST은 전산학부 안성진 교수 연구팀이 미국 럿거스(Rutgers) 대학교와 공동연구를 통해 사람의 라벨링없이 스스로 영상 속 객체를 식별할 수 있는 인공지능 기술을 개발했다고 1일 밝혔다.
이 모델은 복잡한 영상에서 각 장면의 객체들에 대한 명시적인 라벨링 없이도 객체를 식별하는 최초의 인공지능 모델이다.
기계가 주변 환경을 지능적으로 인지하고 추론하기 위해서는 시각적 장면을 구성하는 객체들과 그들의 관계를 파악하는 능력이 필수적이다. 하지만 이 분야의 연구는 대부분 영상의 각 픽셀에 대응하는 객체의 라벨을 사람이 일일이 표시해야 하는 지도적 학습 방식을 사용했다. 이 같은 수작업은 오류가 발생하기 쉽고 많은 시간과 비용을 요구한다는 단점이 있다.
이에 반해 이번에 연구팀이 개발한 기술은 인간과 유사하게 환경에 대한 관측만으로 객체의 개념을 스스로 자가 학습하는 방식을 취한다. 이렇게 인간의 지도 없이 스스로 객체의 개념을 학습할 수 있는 인공지능은 차세대 인지 기술의 핵심으로 기대돼왔다.
비지도 학습을 이용한 이전 연구들은 단순한 객체 형태와 배경이 명확히 구분될 수 있는 단순한 장면에서만 객체를 식별하는 단점이 있었다. 이와 달리 이번에 안성진 교수 연구팀이 개발한 기술은 복잡한 형태의 많은 객체가 존재하는 사실적인 장면에도 적용될 수 있는 최초의 모델이다.
이 연구는 그림 인공지능 소프트웨어인 DALL-E와 같이 텍스트 입력을 통해 사실적인 이미지를 생성할 수 있는 이미지 생성 연구에서 영감을 얻었다. 연구팀은 텍스트를 입력하는 대신, 모델이 장면에서 객체를 감지하고 그 객체의 표상(representation)으로부터 이미지를 생성하는 방식으로 모델을 학습시켰다.
연구팀은 모델에 DALL-E와 유사한 트랜스포머 디코더를 사용하는 것이 사실적이고 복잡한 영상을 처리할 수 있게 한 주요 요인이라고 밝혔다.
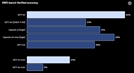
연구팀은 복잡하고 정제되지 않은 영상뿐만 아니라, 많은 물고기가 있는 수족관과 교통이 혼잡한 도로의 상황을 담은 유튜브 영상과 같이 복잡한 실제 영상에서도 모델의 성능을 측정했다. 그 결과, 제시된 모델이 기존 모델보다 객체를 훨씬 더 정확하게 분할하고 일반화하는 것을 확인할 수 있었다.
연구팀을 이끈 안성진 교수는 “인간과 유사한 자가 학습 방식으로 상황을 인지하고 해석하는 혁신적인 기술”이라며 “시각적 상황인지 능력을 획기적으로 개선해 지능형 로봇 분야, 자율 주행 분야뿐만 아니라 시각적 인공지능 기술 전반에 비용 절감과 성능향상을 가져올 수 있다”고 말했다.
이번 연구는 미국 뉴올리언스에서 지난 11월 28일부터 개최돼 12월 9일까지 진행 예정인 세계 최고 수준의 기계학습(머신러닝) 학회인 제36회 신경정보처리학회(NeurIPS)에서 발표됐다.
< 저작권자 ⓒ 서울경제, 무단 전재 및 재배포 금지 >
 hypark@sedaily.com
hypark@sedaily.com