제작비용 : 25만 달러
할리우드에서 애니메트로닉스 제어시스템 설계자로 일했었던 매트 덴튼은 어린 시절 굴착기에 빠져 살았다. 2007년 집 근처의 길가서 서 있던 굴착기를 보던 중 한 가지 프로젝트가 떠올랐다.
“굴착기의 기계 팔은 영락없이 다리처럼 생겼어요. 그래서 굴착기에 6개의 팔을 달아보면 어떨까하는 생각이 들었죠.”
그로부터 4년 후 그는 ‘맨티스(Mnatis)’라는 이름의 곤충을 닮은 로봇을 만들어냈다. 중량 2톤, 높이 2.7m의 맨티스는 사람이 타고 직접 조종할 수 있는 6족 보행 로봇이다.
영화 해리포터 시리즈에 나온 히포그리프의 모델링에 참여하기도 했던 그는 6개의 다리가 달린 로봇을 만들어 본 적이 있지만 지금껏 제작했던 로봇들은 원격조종 모형자동차 수준에 불과했다. 이랬던 그가 실제 굴착기를 이용한 SUV 크기의 로봇을 DIY한 것이다.
혼자서는 프로젝트에 필요한 자금을 마련할 수 없었던 그는 설계도를 그려 1:1 크기의 모형을 제작한 뒤 투자자를 모았다. 하지만 누구도 여기에 돈을 내려고 하지 않았다. 그렇게 수개월이 하릴 없이 흘러가던 중 부유했던 한 지인의 부친이 프로젝트 이야기를 듣고 재정지원을 약속했다.
이후 덴튼은 기계공학자인 친구 조리 리에게 맨티스 제작을 도와달라고 요청했고 처음 몇 주일간 기계 팔, 즉 로봇의 다리를 움직일 근육이라 할 수 있는 유압 액추에이터를 연구했다. 또한 모형을 위해 작성했던 코드를 업그레이드해 거대한 로봇의 구동에 필요한 소프트웨어를 완성했다.
다음은 실질적 제작이었다. 로봇의 차체 격인 굴착기와 6개의 다리에 대한 설계를 마치고, 강철과 알루미늄 소재의 다리 하나를 제작해 테스트했다. 정상적 작동을 확인한 덴튼은 시간을 절약하고자 나머지 5개의 다리 제작을 전문업체에 맡겼다. 그런데 여기서 문제가 생겼다.
“주문제작한 다리에는 차체와의 결합에 필요한 볼트 구멍 중 많은 수가 부실 가공돼 있었어요. 심지어 아예 구멍이 없는 곳도 있었죠.”
성질이 급한 덴튼은 일주일을 할애해 모든 문제를 직접 고쳤다. 이렇게 2011년에 이르러 덴튼은 실제 가동되는 맨티스 시제품을 가질 수 있었다. 그러나 큰 덩치만큼 중량이 너무 무거웠고, 속도가 굼벵이처럼 느렸다.
결국 덴튼은 각 다리의 관절 4개 중 하나씩을 제거해 맨티스의 체중을 180㎏ 감량했다. 유압시스템, 디젤엔진, 전자장비, 조종석 등이 들어있는 차체도 최대한 간략화 했다. 관절이 적어지면 험지에서의 기동력이 떨어지지만 다행히 다리는 예상보다 잘 움직였다. 모든 준비가 완료되고 맨티스의 시운전을 하던 날, 덴튼은 생각과 달리 선뜻 올라타기가 힘들었다고 밝혔다.
“와이파이 무선조종기로 6개월간이나 원격조종 테스트를 거쳤지만 막상 직접 타려니 너무 무섭더라고요. 두려움을 떨쳐내려고 100시간이나 추가 테스트를 했답니다.”
첫 시운전에서 맨티스는 기대했던 대로 잘 작동해줬다. 덴튼도 맨티스의 조종에 적응해나갔다. 현재 그는 다양한 페스티벌에 맨티스를 가져가 전시와 시연을 하고 있다. 관람객 중 몇몇은 이를 보고 속도가 너무 느리다고 비판한다. 이동속도가 시속 3.2㎞를 넘지 못하는 탓에 영화나 건설분야에서 실질적 효용성이 없다는 것이다. 하지만 청소년 관람객들은 맨티스의 진가를 알아보고 열광한다.
“아이들은 맨티스를 정말 좋아한답니다. 직접 타보고자 하는 것은 물론 레이저를 달아서 더 멋있게 만들고 싶어 해요.”
[HOW IT WORKS]

조종간
조종사가 조종석의 터치스크린 패널에서 여러 걸음걸이 패턴 중 하나를 선택한다. 일례로 거친 지형에 최적화된 험지모드에서 맨티스는 다리를 높이 들어 올린 다음 앞으로 내딛는다. 특히 맨티스는 조종간 조작을 통해 전진과 후진은 물론 옆으로 게걸음을 칠 수도 있다. 심지어 조종간을 비틀면 제자리선회까지 가능하다.

지형 탐지 센서
다리 하나가 지면에 닿으면 압력센서가 내장컴퓨터에 그 사실을 알린다. 그리고 나서야 다음 다리가 발을 내딛는다. 이때 발목 부분에 채용한 볼 조인트(ball joint)가 고르지 않은 지면에서도 균형을 잡고 굳건히 서 있을 수 있도록 도와준다. 만일 다리를 내딛을 때 장애물에 걸리면 센서가 이를 감지하고, 내장컴퓨터는 그 다리에게 다른 착지 지점을 찾으라고 명령한다. 향후 덴트는 다리에 초음파 센서를 장착, 지면상태까지 파악 가능토록 할 계획이다.
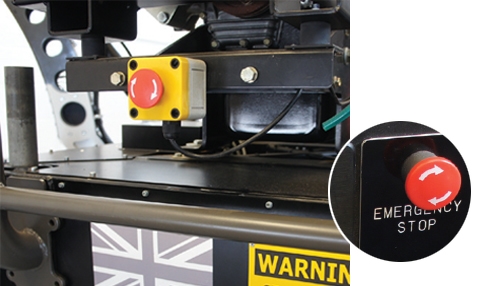
안전시스템
비상상황에 대비해 맨티스에는 적색 버튼 2개가 있다. 하나는 조종석에, 다른 하나는 조종석 외부의 사람이 누를 수 있도록 동체 뒤쪽에 있다. 기동 중 혹시라도 사람이나 동물이 다리에 밟힐 위험이 있을 때 이 버튼을 누르면 즉각 동력이 상실되며 맨티스는 그 자리에 완전히 정지한다.
ANOTHER 탑승형 유인로봇

워킹 포드 (Walking Pod)
제작기간 : 3.5개월
제작비용 : 5,000달러
미술가 스코트 파렌티유는 매년 미국 네바다주 블랙 록 사막에서 열리는 버닝맨(Burning Man) 페스티벌에서 휴식처 겸 이동수단으로 활용하기 위해 돔 형태의 ‘워킹 포드’를 개발했다. 중량 817㎏의 이 포드는 배터리로 동력을 제공받으며, 12개의 다리를 이용해 이동한다. 파렌티유는 이녀석이 신개념 이동주택이나 화성 우주기지 설계자들에게 영감을 줄 수 있었으면 하는 바람이다.

애니메 봇 (Anime Bot)
제작기간 : 제작 중
제작비용 : 50만 달러
로봇공학자 사카모토 하지메는 고교시절 만화영화 ‘건담’을 보면서 휴머노이드 로봇에 심취해 프라모델 제작으로 시간을 보냈다. 올해로 46세가 된 그는 현재 키가 18m나 되는 거대로봇을 직접 제작하려 한다. 그 첫 단계로 3.5m의 다리[위]의 개발을 완료한 상태다. 올 하반기 중 이 다리에 몸통을 얹어놓는 것이 목표다. 그러면 로봇이 완성되기 전에도 몸통 위로 올라가 이리저리 돌아다닐 수 있다.
애니매트로닉스 (animatronics) 애니메이션(animation)과 일렉트로닉스(electronics)의 합성어. 영화, 방송 등을 위해 기계장치와 전자기기로 만든 원격조종 모형 로봇을 뜻한다.
히포그리프 (hippogriff) 말의 몸에 독수리 머리와 날개를 가진 상상의 동물.
고카트 (go-cart) 지붕과 문이 없는 소형 경주용 ·레포츠용 자동차
< 저작권자 ⓒ 서울경제, 무단 전재 및 재배포 금지 >