|
이르면 오는 2017년 6,000m 아래 심해를 누비며 탐사할 수 있는 로봇이 개발된다. 이 로봇이 실제 투입되면 해저 자원탐사 등에 새 장이 열릴 것으로 기대된다.
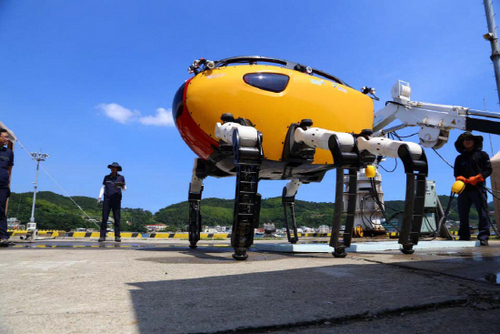
선박해양플랜트연구소는 수심 6,000m까지 내려가는 다관절 복합이동 해저로봇 크랩스터 'CR6000' 하드웨어 제작을 올해 말까지 끝낸 뒤 실해역 실험을 거쳐 2017년 7월 기술개발을 완료할 예정이라고 1일 밝혔다. 크랩스터는 해저에서 걸어다니거나 헤엄치면서 탐색과 로봇팔 작업을 할 수 있는 다관절 로봇이다. 게나 가재처럼 다리 여러 개로 이동한다. 다리 6개로 초당 0.25m 속도로 이동하며 해저를 탐사할 수 있다. 혼탁한 물속에서 반경 100m 이내의 물체를 탐지하고 초음파 카메라로 전방 15m 이내 동영상 촬영도 가능하다. 크랩스터의 주요 임무는 해양과학 조사와 해저 구조물·침몰선박 조사다.
정부는 이미 지난 2010년 개발에 들어가 2012년 세계 최초로 수심 최대 200m 아래까지 내려갈 수 있는 크랩스터 'CR200' 하드웨어 제작을 마쳤으며 이듬해 수중실험에 성공한 바 있다. 지난해에는 세월호 사고 현장에도 한 달간 투입돼 침몰한 선체를 초음파 영상으로 촬영, 제공하는 등 지원활동을 했다. 또 올해 4∼5월에는 태안 마도 해역에서 로봇팔을 이용한 도자기 집어 올리기, 주변 탐사 등 문화재 탐사 발굴 시험을 했다. 해저 6,000m에서 작업 가능한 CR6000이 개발되면 수심 최대 3,000m인 동해뿐만 아니라 망간단괴 등 자원이 잠자고 있는 열수광상 등 심해저 탐사에도 활용할 수 있을 것으로 전망된다.
전봉환 선박해양플랜트연구소 수중로봇연구실장은 "불규칙하고 험한 해저를 근접 이동하면서 정밀조사와 관측작업을 하는 크랩스터가 바닷속 탐사를 획기적으로 발전시킬 것"이라고 말했다.
< 저작권자 ⓒ 서울경제, 무단 전재 및 재배포 금지 >