다관절 6족보행… 험준한 숲도 거뜬<br>쥐며느리 본떠 강력한 내화성 갖춰… 화재감시 요원으로 獨서 개발중<br>카메라 없이 열·냄새로 화재 탐지… 산속 곳곳 대기하다 초기 자체진화
 | | 등산을 하다가 숲속에서 두 개의 긴 더듬이가 달린 괴상한(?) 곤충로봇이 다가와도 너무 놀라지 말자. 이 곤충로봇은 사람을 공격하는 것이 아니라 지켜주기 위해 만들어진 것이다. |
|
산불은 막대한 인적ㆍ물적ㆍ환경적 피해를 초래한다. 하지만 앞으로는 곤충을 닮은 소방로봇의 활약으로 산불의 위협에서 벗어날 수 있게 될 것으로 전망된다.
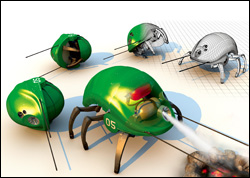
독일 마그데부르크 슈텐달 대학에서 개발하고 있는 자율주행 소방로봇 ‘올루(OLE)’는 각종 첨단 센서와 GPS 장치, 소화약제를 내장한 채 스스로 산불을 찾아 초기에 진화한다. 또한 무선통신 시스템을 통해 화재 발생 사실과 정확한 장소를 알려줘 즉각 소방헬기가 현장에 출동할 수 있도록 해준다.
■ 산불 잡는 소방로봇
산불은 곧잘 대형화재로 이어진다. 인적이 드물어 화재 발생 사실을 초기에 인지하기 어려운데다 나무ㆍ낙엽 등 가연성 물질이 지천으로 널려있기 때문이다.
무려 27만헥타르(ha)의 산림을 잿더미로 만든 지난해 8월의 그리스 산불이나 20만ha를 태우고 10억달러의 재산 피해를 내게 한 미국 캘리포니아의 산불이 좋은 예다. 물론 우리나라도 예외는 아니다. 2005년 산불로 낙산사가 소실된 것을 비롯해 최근 10년간 연평균 500여건의 산불이 발생, 4,436 ha의 산림 피해를 입었다.
그렇다면 이처럼 막대한 인적ㆍ물적ㆍ환경적 피해를 초래하는 산불의 위협에서 벗어날 수 있는 방법은 없을까. 전문가들은 예방과 초기 진화를 해답으로 꼽는다. 문제는 산림 자체가 워낙 방대하고 광활한 탓에 이를 실시간으로 감시ㆍ순찰하는 것이 사실상 불가능하다는 것.
하지만 머지않아 이 불가능이 가능으로 바뀌게 될지 모른다. 독일의 마그데부르크 슈텐달 대학에서 스스로 산불을 탐지하고 방제능력까지 갖춘 첨단 소방로봇을 개발하고 있기 때문이다.
■ 열과 냄새로 화재 탐지
‘오프-로드 소방장치(Off-road LoEscheinheit)’의 약자를 따 ‘올루(OLE)’로 명명된 이 로봇은 글자 그대로 산불 진화 전문 소방로봇이다. 길이 1.2m, 폭 0.6m로 구조견인 세인트버나드와 유사한 크기의 몸집을 가지고 있으며 내부에 화재 진압을 위한 물탱크와 분말소화기를 내장하고 있다.
OLE의 가장 큰 특징은 바로 지능형 자율 주행 로봇이라는 것. 산불이 발생했을 때 원격지에 있는 사람이 조종해 진화 작업에 나서는 것이 아니라 스스로 화재 여부를 판단하고 현장을 찾아가 방제에 나선다는 얘기다.
이로 인해 OLE에는 대다수 로봇들에 달려 있는 카메라가 전혀 없다. 대신 GPS 송ㆍ수신 장치와 적외선 센서, 열 감지 센서를 통해 주변의 사물을 파악하고 산불 발생 지점을 알아낸다. 또한 발화 지점이 장애물에 가려 있을 경우에 대비, 냄새로도 화재를 알 수 있도록 고성능 바이오 센서가 장착돼 있다.
이 같은 센서들에 힘입어 OLE는 최대 800m 밖에서 발생한 화재까지 발견이 가능하다. 소방 당국은 산림 곳곳을 정기적으로 순찰하거나 수백~수천대의 감시카메라를 설치하지 않고도 OLE를 산속 곳곳에 대기시켜놓기만 하면 손쉽게 산불 발생 방지 효과를 거둘 수 있는 셈이다. 또한 GPS는 대당 12만5,000달러~20만 달러로 예상되는 OLE의 도난을 막는 기능도 제공한다. 누군가 이 로봇을 훔쳐가더라도 그 위치를 즉각 파악할 수 있기 때문이다.
■ 쥐며느리의 방어기술 모방
슈텐달 대학 연구팀은 OLE가 소방로봇으로서 제역할을 하기 위해서는 강력한 내화성을 갖춰야 한다는 점에 주목, 최대 1,010℃까지 견디는 내화성 세라믹 섬유 복합재로 몸체를 만들 계획이다. 또한 등 부분의 외피를 분할 접이식 체절(體節)형으로 설계함으로서 방화 능력을 극대화했다. 위험에 처했을 때 껍질을 동그랗게 말아 자신을 보호하는 쥐며느리의 신체 방어 메커니즘을 모방한 것이다.
이 때문에 OLE는 진화 실패로 불길에 휩싸이는 등 최악의 상황에서도 다리를 포함한 모든 몸체를 방화 외피 속으로 넣고 감싸는 방식으로 내부의 센서와 물탱크 등을 화기로부터 안전하게 보호할 수 있다.
OLE의 다리를 여섯 개로 디자인한 것도 로봇의 보호를 염두에 둔 것이다. 이 프로젝트를 처음 제안한 울리히 볼게무트 교수는 “2족 보행이나 바퀴형 로봇이 보기에 좋을지 몰라도 온갖 장애물을 헤치고 불로 뛰어들어야 하는 OLE에는 큰 의미가 없다”며 “여섯 개의 다리는 몸체로의 열기 접촉을 최소화할 수 있는 선택”이라고 설명했다.
덧붙여 로봇 공학자의 관점에서 6족 보행은 로봇을 위한 가장 완벽한 설계이기도 하다. 안정적인 제어가 가능한데다 각각의 장애물에 따라 어떻게 움직여야 할지 계산하기도 쉽다.
특히 연구팀은 총중량 70~90㎏의 OLE가 이 여섯 개의 다리로 울창한 숲속에서도 최대 시속 20~30㎞의 속도를 낼 수 있을 것으로 기대하고 있다.
■ 화재 감시 요원으로 양성
현재 연구팀은 OLE의 소방 임무 방식을 놓고 두 가지 방안을 제시하고 있다. 하나는 숲 속을 계속 돌아다니면서 능동적으로 화재를 발견, 진화하도록 하는 것이다. 그리고 다른 하나는 등산로ㆍ캠프장 등 화재 빈도가 높은 장소에 정지 상태로 웅크려 놓은 상태에서 화재가 감지됐을 때만 작동되도록 하는 방식이다.
전문가들은 전자의 경우 배터리 수명 등에서 문제 발생의 소지가 있어 후자와 같은 형태의 활용이 더 큰 효용성을 거둘 수 있다는 평가를 내리고 있다. 이 점을 감안해 일각에서는 OLE의 방제능력을 제거하고 아예 화재감시 전문로봇으로 활용하자는 방안도 내놓고 있다.
스웨덴 SP기술연구소의 화재연구가인 마거릿 시몬슨 박사는 “화재감지에 있어 OLE는 인간 소방수와는 비교할 수 없을 만큼 탁월한 능력을 발휘한다”며 “소방헬기를 화재현장으로 빠르고 정확하게 안내하는 최고의 화재감시 전문요원이 될 수 있다”고 말한다.
이에 대해 볼게무트 교수는 “유럽에서만 매년 50만 ha의 산림이 산불로 사라지고 있다”며 “산불감시ㆍ화재진압 등 어떤 임무를 부여하든 OLE는 금전으로 환산할 수 없는 기대 이상의 가치를 제공해 줄 것”이라고 강조했다.
소방 로봇의 핵심 매커니즘
내열 세라믹으로 만든 갑옷 최대 1,010℃ 고열도 견뎌
◇갑옷=쥐며느리를 본 뜬 체절형 갑옷이 고온의 화염으로부터 OLE의 유도시스템ㆍ내장센서ㆍ전원장치 등을 보호한다. 내열 세라믹 섬유 복합재를 사용, 최대 1,010℃를 견뎌낸다.
◇6족 보행=OLE에는 바퀴가 아닌 다(多)관절 다리가 채용된다. 화재로 뜨거워진 지면이나 재에 접촉되는 부위를 최소화하기 위해서다. 특히 다리를 여섯 개로 만든 것은 로봇 공학적으로 이상적인 선택이다. 가장 안정적인 제어가 가능하고 각각의 장애물에 따라 어떻게 움직여야 할지 계산하기도 쉽다.
◇소화약제=전체 중량의 제약으로 소화약제 탱크의 크기는 그리 크지 않다. 하지만 화재를 초기에 발견했을 경우 발화 지점의 불길을 진압하기에 충분한 양의 물과 포말, 그리고 분말형 화학약제를 내장할 수 있다.
◇활동 반경=OLE는 적외선 센서, 열 감지 센서, 바이오 센서를 활용해 800m 이내의 화재 감지가 가능하다. 이 때문에 일부 전문가들은 OLE를 화재 진압이 아닌 화재 감지 전문 로봇으로 사용할 때 효과를 극대화할 수 있다고 말하기도 한다. OLE가 무선통신 시스템을 통해 화재 발생 사실과 정확한 장소를 알려주면 즉각 소방헬기를 현장에 출동시켜 진압하는 방식이다
|
< 저작권자 ⓒ 서울경제, 무단 전재 및 재배포 금지 >