“엘리베이터가 도시를 수직으로 확장시켰던 것처럼 매핑(mapping·지도화) 기술을 통해 가능해지는 완전자율주행은 공간을 수평 방향으로 무한 확장시키는 계기가 될 것입니다. 사람이 공간을 찾아가는 게 아니라 공간이 사람을 찾아오는 시대가 오는 것이죠.”
최근 성남시 사옥에서 서울경제와 만난 백종윤 네이버랩스 자율주행그룹 부문장은 자율주행이 만들어갈 세상을 이같이 그렸다.
자율주행은 디지털트윈 접목이 가장 활발한 분야 중 하나다. 정밀한 동일성이 요구되는 시뮬레이션은 물론이고 주행 과정에서도 가상공간의 정보를 끊임없이 송수신하고 이를 시각화해 차량에 노출하는 기술이 요구된다. 자율주행차의 핵심요소 중 하나인 증강현실(AR) 기술을 접목한 헤드업디스플레이(HUD)가 대표적이다.
완전한 자율주행을 위해서는 현실의 공간 데이터를 가상으로 옮기는 지도 기술이 전제돼야 한다. 백 부문장은 “네이버랩스의 고정밀지도 구축 기술은 디지털트윈으로 가기 위한 준비 단계”라며 “지도는 자율주행·가상현실(VR)·AR·로봇 같은 각종 기술을 올릴 수 있는 그릇과도 같다”고 설명했다. 예를 들어 AR 글라스를 착용했을 때 건물 위에 상점 데이터가 표시되게 하려면 지도라는 ‘사전정보’가 반드시 필요하다는 것이다. 그는 “정확하게 데이터를 띄우기 위해서는 위치와 이미지를 통해 동일한 상점인지를 확인하는 기술과 함께 사용자의 현재 위치 역시 파악해야 한다”고 부연했다.
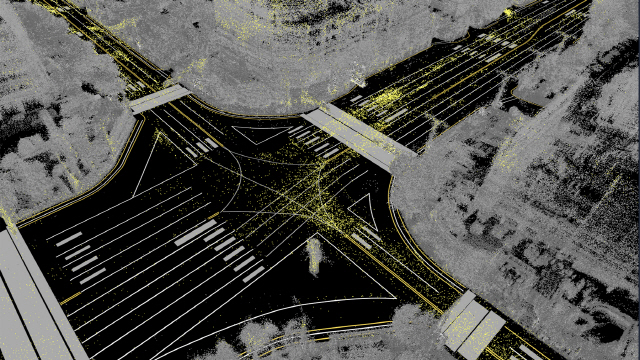
네이버랩스는 최근 항공사진 2만5,000장을 기반으로 서울시 전체를 3차원(3D) 모델로 구현했다. 이와 별도로 독자적인 ‘하이브리드 HD 매핑’ 기술로 차선정보 등 데이터가 추가된 상암·여의도·마곡·판교 지역의 고정밀지도(사진)도 제작해 공개했다. 하이브리드 HD 맵핑은 자동차에 GPS 센서를 부착해 정보를 수집하는 모바일매핑시스템(MMS) 기술에 항공사진을 더해 지도 구축의 효율성과 정확도를 한번에 끌어올린 기술이다.
도심 안팎의 공간이 자율주행으로 연결되는 ‘A-CITY’가 궁극적인 목표다. 도시 차원의 자율주행 플랫폼을 통해 ‘움직이는 공간’을 창출하겠다는 것이다. 백 부문장은 “자율주행 기술을 통해 도심 속에서 스스로 움직이는 상점이나 로봇택배가 가능해질 수 있다”며 “이는 물류창고 개념 자체를 뒤바꿔 기존의 건물이나 공간을 크게 확장하고 생산성 역시 끌어올릴 수 있을 것으로 기대한다”고 전했다.
이를 위해 네이버는 자율주행을 위한 요소기술 연구에 집중해왔다. 컴퓨터 비전과 딥러닝 분야 저명 국제학회인 CVPR에서 진행된 기술 챌린지 3개 전 분야에서 통합 1위를 기록하는 등 사기업으로서는 이례적으로 HD 맵핑, 측위, 비전 분야 기술력을 세계적으로 인정받고 있다.
백 부문장은 디지털트윈 완성을 위해서는 정밀지도 데이터 제공을 가로막는 현행 규제를 개선하는 것이 시급하다고 본다. 그는 “10년 내 전국 지도 완성을 말하는 단계에서 공도(公道)인 도로 데이터조차 자유롭게 제공할 수 없어 답답하다”며 “보안 이슈가 없는 데이터를 받아 가공하는 만큼 자율주행 발전을 위해 연구 목적에 한해서라도 풀어줘야 한다”고 강조했다. 산업통상자원부는 오는 2030년 ‘미래차 경쟁력 1등 국가’로 도약한다는 목표를 세우고 2024년까지 주요 도로에 완전자율주행차가 달릴 수 있는 지도·교통 시스템을 갖추겠다고 발표한 바 있다.
/성남=오지현기자 ohjh@sedaily.com
< 저작권자 ⓒ 서울경제, 무단 전재 및 재배포 금지 >