코엑스, 인천국제공항, 하남 스타필드처럼 내부 구조가 복잡한 대형 건물에 들어갈 때면 방향감각을 잃고 헤매기 쉽다. 로봇이라면 어떨까. 사람보다 길을 잘 찾을 수 있을까. 현재로서는 ‘글쎄올시다’이다. 사람은 한번 슬쩍 봐도 동일한 곳인지 직관적으로 알 수 있는 장소를 로봇은 다른 곳으로 혼동하고는 한다. 예를 들어 같은 건물 내 특정 상점에서 간판이나 쇼윈도의 전시 상품이 일부만 바뀌어도 로봇은 동일한 장소인지 정보의 일치를 판단하는 데 애를 먹는 경우가 많다.
공상과학영화·소설 속의 로봇은 인간보다 완벽한 존재로 묘사되고는 하지만 현실 속의 로봇은 아직 갈 길이 멀다. 인간이 최소 수만년간의 인류 진화과정에서 얻은 고도의 공감각과 후천적 학습을 통해 얻은 공간인지 경험도 로봇이 아직 제대로 구현하지 못하는 기능 중 하나다. 그 숙제를 풀기 위해 나선 곳이 있다. 로봇과 정보기술(IT) 등 첨단 기술을 연구개발(R&D)하는 네이버 자회사 ‘네이버랩스’다.

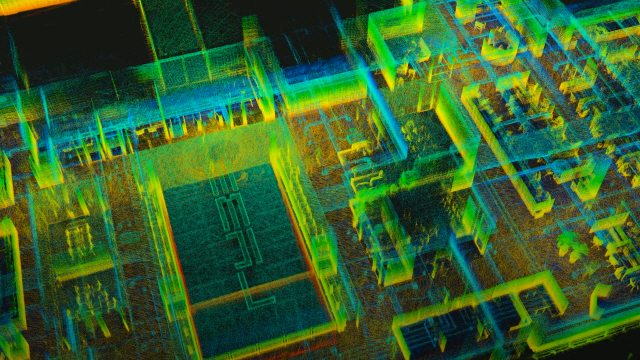
3일 서울경제신문이 방문한 경기도 성남시 분당구 네이버랩스 본사에서는 로봇들이 길을 헤매지 않도록 정확한 실내 지도를 만들어주는 로봇(일명 ‘매핑로봇’) 개발이 한창 진행되고 있었다. 모델명은 ‘M1X’. 지난 2016년 네이버가 자사 최초로 공개했던 로봇 ‘M1’의 후속 개량형이다. M1X는 밑단에 달린 바퀴를 이용해 실내를 자율이동하며 3차원(3D)의 고정밀지도를 만든다. 각각 레이저와 전자파로 거리와 위치를 재는 라이더, 레이더를 비롯해 본체에 달린 각종 광학·전자센서로 ㎝ 단위까지 세밀하게 주변의 공간정보를 기록한다.
이렇게 만들어진 지도는 인간이 읽을 수 없는 기계어로 돼 있다. 사람이 아니라 다른 로봇들이 읽도록 제작된 지도이기 때문이다. M1X가 제작한 실내 지도를 통신을 통해 클라우드서버에 올려 저장(업로드)하면 해당 지도 정보를 기반으로 서버가 다른 자유이동로봇들의 위치를 파악하고 이동경로를 결정할 수 있다. 위성항법시스템(GPS)이 연결되지 않는 실내에서도 로봇이 길을 잃거나 장애물과의 충돌 없이 제대로 길을 찾아갈 수 있게 된 것이다. 예를 들어 쇼핑몰 안내로봇, 공항보안로봇, 건물 내 물류배송로봇, 청소로봇 등이 M1X가 제작한 지도를 기반으로 자신이 어디에 있고, 어디로 이동할지에 대해 서버컴퓨터의 지시를 받아 움직인다. 네이버랩스의 한 관계자는 “실내 특정 위치의 사진을 한 장 찍어 보여줘도 그것만으로도 어느 위치인지 파악할 수 있도록 하는 게 목표”라며 “이를 위해 고정밀지도를 보다 오차 없이 만들고, 로봇이 해당 지도자료와 주변의 위치정보를 비교해 공간을 정확히 인식하도록 딥러닝 기법 등을 통해 로봇을 학습시키는 데 주력하고 있다”고 설명했다.
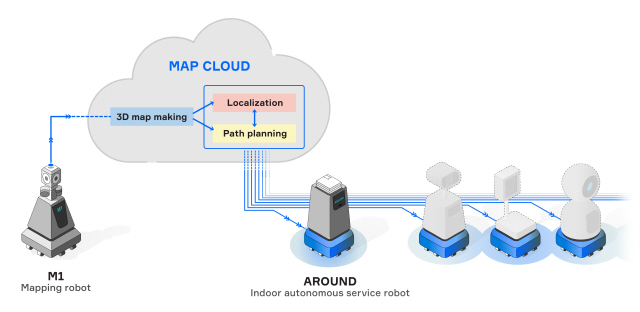
네이버랩스가 개발 중인 매핑로봇 시스템의 장점 중 하나는 해당 지도와 연동해 움직이는 자율이동로봇들의 제작단가를 기존보다 낮출 수 있다는 점이다. 그 첫 번째 비결은 클라우드 기술에 있다. 우선 클라우드 기술을 통해 로봇 본체에서 들어갈 각종 전자기기와 위치·장애물감지 센서류를 최소화했다. M1X가 업로드한 지도정보를 바탕으로 클라우드 서버가 자신과 연동된 자율이동로봇들의 두뇌 역할을 대신해주기 때문에 각 로봇들에는 두뇌에 해당하는 컴퓨팅장치가 들어갈 필요가 없다. 또한 라이다와 레이더와 같은 주요 센서들도 매핑로봇 이외에는 필요 없게 된다. 그만큼 로봇 제작단가가 줄어드는 것이다. 네이버 관계자는 “현재는 로봇들의 두뇌 역할을 하는 클라우드서버가 위치정보를 판단해주는 역할만을 하는 수준이지만 앞으로는 로봇 각각의 자세 제어까지도 클라우드서버에서 판단해 처리하는 방향으로 기술을 완성하려고 한다”며 “사람으로 치면 (사고 기능을 하는) 인간의 대뇌뿐 아니라 (운동감각을 통제하는) 소뇌까지도 개별 로봇이 아닌 클라우드서버 차원에서 해결하겠다는 것”이라고 소개했다.

제작단가 절감의 두 번째 비결은 로봇 플랫폼의 공용화다. 자율이동용 바퀴, 구동장치 등이 들어가는 밑단은 범용으로 설계했다. 네이버랩스는 이러한 자율이동로봇 플랫폼을 ‘어라운드’라고 명명했다. 어라운드 플랫폼 위에 어떤 장비를 얹느냐에 따라 지도제작용 로봇이 되기도 하고, 안내용 로봇이나 운송용 물류로봇 등이 될 수도 있다.
기존에도 건물 등의 내부 위치를 측정해 실내지도를 만드는 측위 기술들은 있었다. 하지만 기존 방식들은 정밀한 3D 지도를 만드는 데 한계가 있었다. 건물 내 여러 곳에 설치된 와이파이 기지국에서 보내온 전파를 기반으로 와이파이 중계기까지의 상대적 거리를 재서 현재의 위치를 파악하는 수준이기 때문이다. 앞으로 보다 정밀한 측위가 가능한 ‘와이파이6’가 국내외에 보급될 예정이지만 여전히 해당 기술만으로는 3D 고정밀지도 제작이 어렵기 때문에 네이버는 자사만의 독창적인 측위 기술을 일부 보완하는 차원에서만 와이파이6 기술을 적용할 것으로 전망된다. 네이버 관계자는 “국내외에 3D 고정밀 실내 지도를 제작하는 업체가 아직 많지는 않다”며 “저희는 선도적으로 정밀지도를 제작해 이를 기반으로 실내를 돌아다니는 로봇을 현대중공업과 협력해 개발할 것”이라고 밝혔다. /성남=민병권기자 newsroom@sedaily.com
< 저작권자 ⓒ 서울경제, 무단 전재 및 재배포 금지 >
 newsroom@sedaily.com
newsroom@sedaily.com