국내 연구진이 고양이의 눈 구조를 모방해 야간에도 물체를 비교적 정확하게 식별할 수 있는 카메라 기술을 개발했다. 최근 자율주행차나 로봇, 드론 등에 활용되고 있는 카메라 기반의 비전(시각정보) 인공지능(AI)의 성능을 높이는 데 기여할 것으로 기대된다.
광주과학기술원(GIST)은 송영민 전기전자컴퓨터공학부 교수와 김대형 서울대 화학생물공학부 교수 연구팀이 수직 가변 조리개와 은(銀) 휘판 등으로 구성된 카메라를 개발했다고 23일 밝혔다. 연구성과는 국제 학술지 ‘사이언스 어드밴시스’의 표지논문으로 선정돼 18일 게재됐다.
로봇이 주변 환경을 인식하는 데 필요한 카메라를 포함한 비전 시스템은 야간처럼 어둡거나 반대로 매우 밝은 환경에서는 물체와 배경을 구분하는 데 한계를 보인다. 기존 카메라는 눈의 동공을 모방한 원형 조리개를 사용해 빛의 양을 조절할 수 있지만 이를 위해서는 복잡한 AI 연산이 필요해 역시 보편적으로 쓰기에는 한계가 있는 상황이다.
연구팀은 고양이의 눈 구조를 모방한 ‘위장 해제’ 기술을 구현했다. 고양이 눈은 수직으로 길쭉한 동공과 망막에서 빛 반사 역할을 하는 휘판을 가졌다. 수직 동공은 강한 빛을 효과적으로 차단할 수 있고 휘판은 어두운 환경에서도 빛을 충분히 받아들일 수 있다. 특히 휘판으로 인해 밤에 고양이 같은 동물의 눈이 빛나는 것을 볼 수 있다.
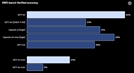
연구팀은 수직 구조의 조리개와 은으로 만든 휘판을 통해 카메라의 빛 흡수율을 기존보다 52% 향상하는 데 성공했다. 또 광학 시뮬레이션과 실험을 통해 다양한 환경에서의 위장 해제 기능을 검증했다고 전했다.
송 교수는 “고양이의 수직 동공과 휘판 구조를 모사해 고감도 인공 시각 시스템을 개발하고 단안 위장 해제 능력을 성공적으로 입증했다”며 “다양한 조명 환경에서도 소프트웨어 후처리 없이 하드웨어 자체로 객체 인지 능력을 향상시킬 수 있어 자율주행 자동차, 드론, 감시 로봇 등 다양한 분야에 적용될 수 있을 것으로 기대한다”고 말했다.
< 저작권자 ⓒ 서울경제, 무단 전재 및 재배포 금지 >
 sookim@sedaily.com
sookim@sedaily.com