

하반신이 완전히 마비된 장애인을 위해 휠체어까지 직접 걸어와 편하게 착용할 수 있는 보행 보조용 웨어러블(착용형) 로봇을 국내에서 개발됐다.
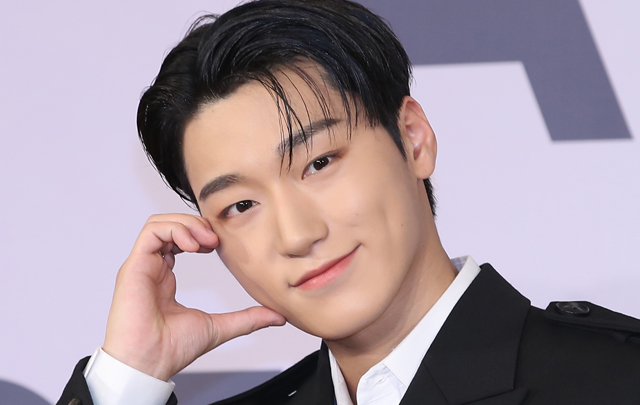
한국과학기술연구원(KAIST)은 공경철 기계공학과 교수 겸 엔젤로보틱스 의장 연구진이 개발한 하반신 마비 장애인용 웨어러블 로봇 ‘워크온슈트F1’을 24일 공개했다. 기존 엔젤로보틱스가 상용화한 재활치료나 근력 보조용과 달리 하반신 마비 중에서도 중증도가 가장 높은 완전마비(ASIA-A) 장애인을 위한 제품이다.
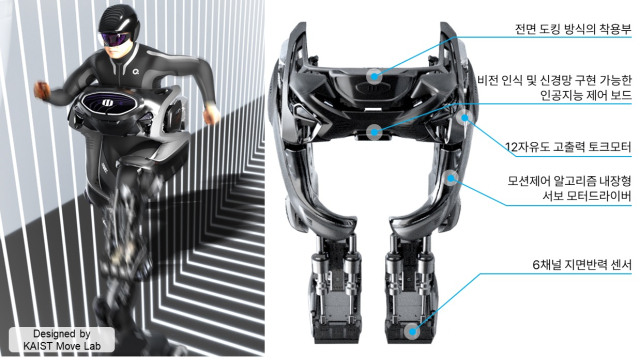
워크온슈트F1는 휴머노이드(인간형 로봇)처럼 직접 사용자가 있는 곳으로 걸어올 수 있다. 기존 제품과 달리 사용자가 제품을 뒤에서 착용하지 않고 앞에서 착용하는 전면 착용 방식을 채택해 휠체어에서 내려야 하는 불편함을 없앴다. 워크온슈트F1는 또 무게중심을 능동적으로 제어하는 기능을 적용해 사용자가 로봇을 잘못 밀더라도 넘어지지 않고 균형을 유지할 수 있다. 사용자가 착용 후에는 지팡이 없이 걸을 수 있도록 균형 성능도 향상됐다. 제품 디자인은 박현준 KAIST 산업디자인학과 교수가 맡았다.
공 교수는 “웨어러블 로봇은 장애인이 타인의 도움 없이 걸을 수 있게 해주지만 착용을 위해서는 타인의 도움이 반드시 필요하다는 본질적인 문제를 갖고 있었다”며 “워크온슈트에서 파생된 수많은 부품, 제어, 모듈 기술들이 웨어러블 로봇 산업 전체의 표준을 제시하고 있다”고 말했다.
워크온슈트F1는 이달 27일 4년 만에 스위스에서 열리는 장애 극복 사이보그 올림픽인 사이배슬론에 출전한다. 완전마비 장애를 가진 김승환 연구원이 선수로 참가한다. 공 교수 연구팀은 앞서 대회 금메달을 획득한 바 있다.
< 저작권자 ⓒ 서울경제, 무단 전재 및 재배포 금지 >
 sookim@sedaily.com
sookim@sedaily.com